
Description
Description
- Unitree Dex3-1 Tactile Hand for Unitree H2 (Right)
- Offers three-finger dexterous hand with 7 degrees of freedom
- Designed for versatile operation
- Featuring hybrid force–position control
- Delivers both sensitivity and reliability
The Unitree Dex3-1 Tactile Hand for the Unitree H2 (Right) is a power-controlled, highly dexterous robotic hand designed for versatile operation. Featuring hybrid force–position control, it delivers both sensitivity and reliability, enabling precise manipulation of objects.

The Dex3-1 is a three-finger dexterous hand with 7 degrees of freedom and 7 independent motion axes: six micro brushless force-control direct-drive joints and one micro brushless force-control gear-drive joint. Equipped with 33 tactile sensors, it offers detailed feedback for advanced control. It can be paired with the Unitree G1 humanoid robot to execute a wide range of complex tasks.
- 1x Unitree Dex3-1 Tactile Hand for Unitree H2 (Right)
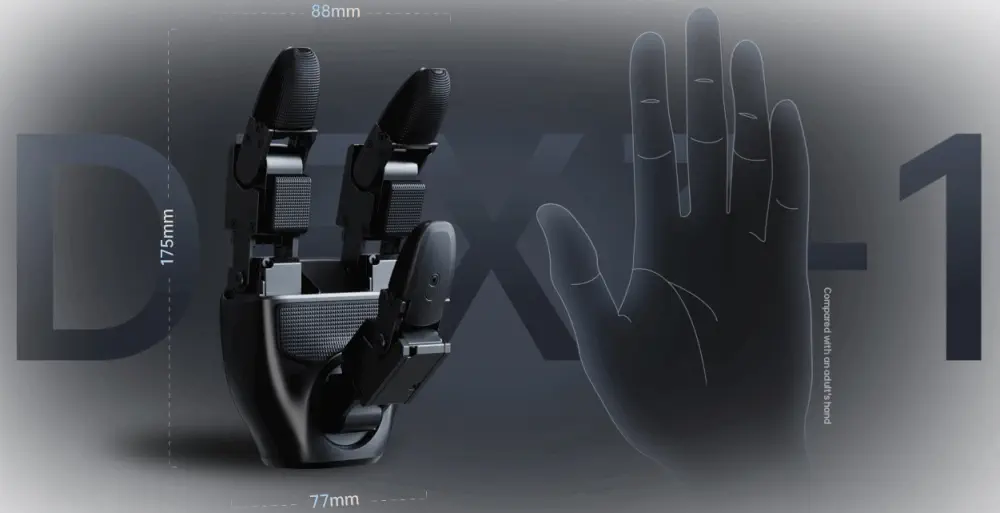
- 88 x 77 x 175 mm (L x W x H)
- Degrees of Freedom
- Thumb x3
- Index Finger x2
- Middle Finger x2
- Transmission Mechanism
- 6 Motors Drive Directly
- 1 Motor Drive with Gears
- Angle of Joint
- Thumb Joint 0: -60°~60°
- Thumb Joint 1: -35°~60°
- The Thumb Joint 2: 0 to 100°
- Index Finger Joint 0: 0 °~90°
- Index Finger Joint 1: 0 °~100°
- Middle Finger Joint 0: 0 °~90°
- Middle Finger Joint 1: 0 °~100°
- Fingertip Repeat Positioning Accuracy: ±2mm
- Working Voltage: 12 ~ 58V
- Static Current: 58V at 0.2A
- Maximum Current: 10A
- Communication Interface: USB 2.0
- Working Temperature Range: -20°C ~ 60 °C
- Load Conditions (Palm Facing Down At Room Temperature, Grasping A 5cm Round Hard Object)
- The Maximum Weight is 500g
- The Maximum Power is: 400W at 3s
- Load Condition (Palm Facing Left At Room Temperature, Grasping A 5cm Round Hard Object)
- The Maximum Weight is 500g
- The Maximum Power is: 400W at 3s
- Number of Pressure Sensors: 9 (Total of 33 Pressure Sensors)
- Array resolution
- 2×2 (Palm) x3
- 2×2 (Single Finger Pad) x3
- 3×1 (Single Fingertip) x3
- Range of Perception: 10g-2500g
- Maximum Acceptance (Unamaged): 20 kg
- Communication rate: 1000 Hz
- The number of bytes in a full packet
- Sender: 1234 bytes
- Receiver: 1270 bytes
- Perceptual feedback: Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Temperature, Voltage and Current, Sensor Pressure Value, Sensor Temperature Value, imu Data
- Control feedback: Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Stiffness Coefficient, Joint Damping Coefficient
- Weight: 710 g
Explore more from our collection.



Reviews
There are no reviews yet.